Moment pędu punktu materialnego i zasada zachowania momentu pędu
Stronę tą wyświetlono już: 8969 razy
Moment pędu  jest iloczynem wektorowym wektora promienia
jest iloczynem wektorowym wektora promienia  i pędu
i pędu  :
:

Dla lepszego zrozumienia, wektor momentu pędu jest wektorem prostopadłym do płaszczyzny wyznaczonej przez wektor promienia i pędu , co pokazane zostało na rysunku 1.
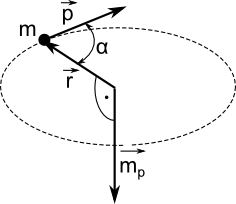
Długość wektora momentu pędu jest równa iloczynowi długości wektora promienia , pędu oraz sinusa kąta α zawartego pomiędzy tymi wektorami.
 | [2] |
Zapis wyrażenia w formacie TeX-a:
W szczególnym przypadku, który mimo wszystko dość często jest rozpatrywany kąt α jest równy 90° a więc zależność [2] upraszcza się wtedy do iloczynu długości wektorów promienia oraz pędu :
 | [3] |
Zapis wyrażenia w formacie TeX-a:
Zanim zacznę opowiadać tutaj o zasadzie zachowania pędu i abyście mogli zrozumieć tę zasadę, muszę omówić najpierw pojęcie momentu siły  , który jest równy iloczynowi skalarnemu wektora promienia i siły
, który jest równy iloczynowi skalarnemu wektora promienia i siły  .
.

Tak jak w przypadku momentu pędu tak i w przypadku momentu siły wartość skalarna jest dana następującą zależnością:
 | [5] |
Zapis wyrażenia w formacie TeX-a:
I znów, tak jak w przypadku momentu pędu tak i w przypadku momentu siły wyrażenie [5] upraszcza się, gdy kąt α jest równy 90°:
 | [6] |
Zapis wyrażenia w formacie TeX-a:
Skutkiem działania momentu siły jest zmiana momentu pędu , pędu ciała jak również prędkości obwodowej  oraz kątowej
oraz kątowej  . Ponadto można stwierdzić, że gdy siła ma ten sam zwrot i kierunek co wektor pędu lub obwodowej prędkości chwilowej ciała , to wektor pędu rośnie, w przeciwnym zaś przypadku maleje.
. Ponadto można stwierdzić, że gdy siła ma ten sam zwrot i kierunek co wektor pędu lub obwodowej prędkości chwilowej ciała , to wektor pędu rośnie, w przeciwnym zaś przypadku maleje.
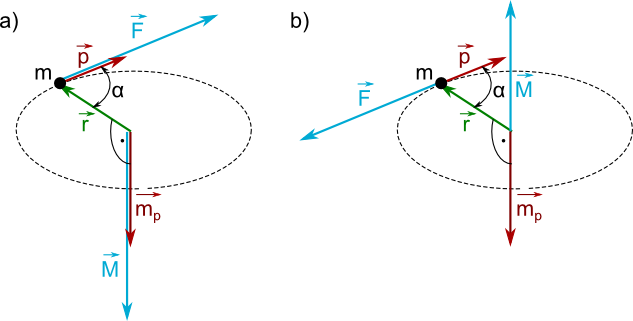 na moment pędu : a) gdy zwrot i kierunek wektora siły jest zgodny z kierunkiem i zwrotem wektora pędu
na moment pędu : a) gdy zwrot i kierunek wektora siły jest zgodny z kierunkiem i zwrotem wektora pędu  ; b) gdy zwrot wektora siły jest przeciwny do wektora pędu .
; b) gdy zwrot wektora siły jest przeciwny do wektora pędu .Zmiana pędu po czasie  jest równa momentowi siły , ponieważ to siła powoduje zmianę ruchu a miarą ruchu jest pęd , z którym związany jest moment pędu .
jest równa momentowi siły , ponieważ to siła powoduje zmianę ruchu a miarą ruchu jest pęd , z którym związany jest moment pędu .

Każdy chyba się ze mną zgodzi, że już najwyższy czas aby porozmawiać o tym, znaczy się o zasadzie zachowania momentu pędu , którą w matematyczny sposób bo sposoby można zapisać tak:

A po ludzku mówiąc? Po ludzku mówiąc będzie tak: jeżeli moment siły działającej na punkt materialny względem pewnego punktu w przestrzeni jest równy zeru to moment pędu względem tego samego punktu w przestrzeni jest stały.
A teraz pomyślmy, przez chwilę pomyślmy logicznie i zastanówmy się kiedy moment siły jest równy zeru? To proste, gdy siła jest równa zero. A czy istnieje jeszcze jakiś przypadek, taki w którym siła nie jest równa zeru a mimo to moment siły jest równy zero? Spójrzmy łaskawym okiem na wzór [5], i zastanówmy się wspólnie. Jest tam współczynnik sin α, prawda? Kiedy ten współczynnik będzie równy zero to i moment siły będzie równy zero. Teraz pytanie zagadka: kiedy współczynnik sin α jest równy 0? Odpowiedź brzmi, gdy α jest równe 0° lub gdy jest równe 180°. Innymi słowy, gdy kierunek siły pokrywa się z kierunkiem wektora promienia to moment siły jest równy zero. Siły , których kierunek jest taki sam, co wektora promienia nazywa się siłami centralnymi.
Skoro moment pędu nie może ulec zmianie, bez działania na dane ciało siłą, to co się stanie, gdy zmieni się np. promień , po którym to ciało się porusza? Ponieważ promień się zmniejszył, a moment pędu pozostał taki sam, to zmianie uległ pęd ciała. Z kolei pęd to iloczyn masy m ciała i wektora prędkości . Masa m ciała jest stała, więc pozostaje tylko się domyślać, że to prędkość ulegnie zmianie, a skoro tak, to i prędkość kątowa ω musi ulec zmianie.
Rozważmy więc następującą sytuację: kulka zawieszona na sznurku o długości r przeplecionym przez tulejkę wprawiona została w ruch obrotowy, po czym bez działania już siłą promień ruchu kulki zmniejszono dwukrotnie. Jak zmieni się prędkość liniowa i kątowa ω?
Z zasady zachowania pędu skorzystać należy i rozpisać następujące równanie (przyjmuję tutaj, że wektor pędy jest prostopadły do wektora promienia ):
Pęd p jest równy iloczynowi masy m i prędkości V, więc równanie [9] można jeszcze troszeczkę rozpisać:
Po odpowiednim przekształceniu i uproszczeniu równania [10] otrzymuje się prędkość liniową V2 po zmniejszeniu promienia r o połowę.

Prędkość liniowa wzrosła dwukrotnie, a kątowa ω ile razy? Na to dręczące nas pytanie można odpowiedzieć jedynie stosując wzór na prędkość kątową ω w zależności od prędkości obwodowej V zastosowane w równaniu [10]:
 | [12] |
Zapis wyrażenia w formacie TeX-a:
Przekształcając otrzymujemy:

Prędkość kątowa ω2 wzrosła czterokrotnie, a wszystko to dlatego, że promień r zmalał dwukrotnie.
Zasada zachowania momentu pędu ma również zastosowanie w przypadku ruchu Księżyca wokół Ziemi (jak również innych ciał niebieskich).
